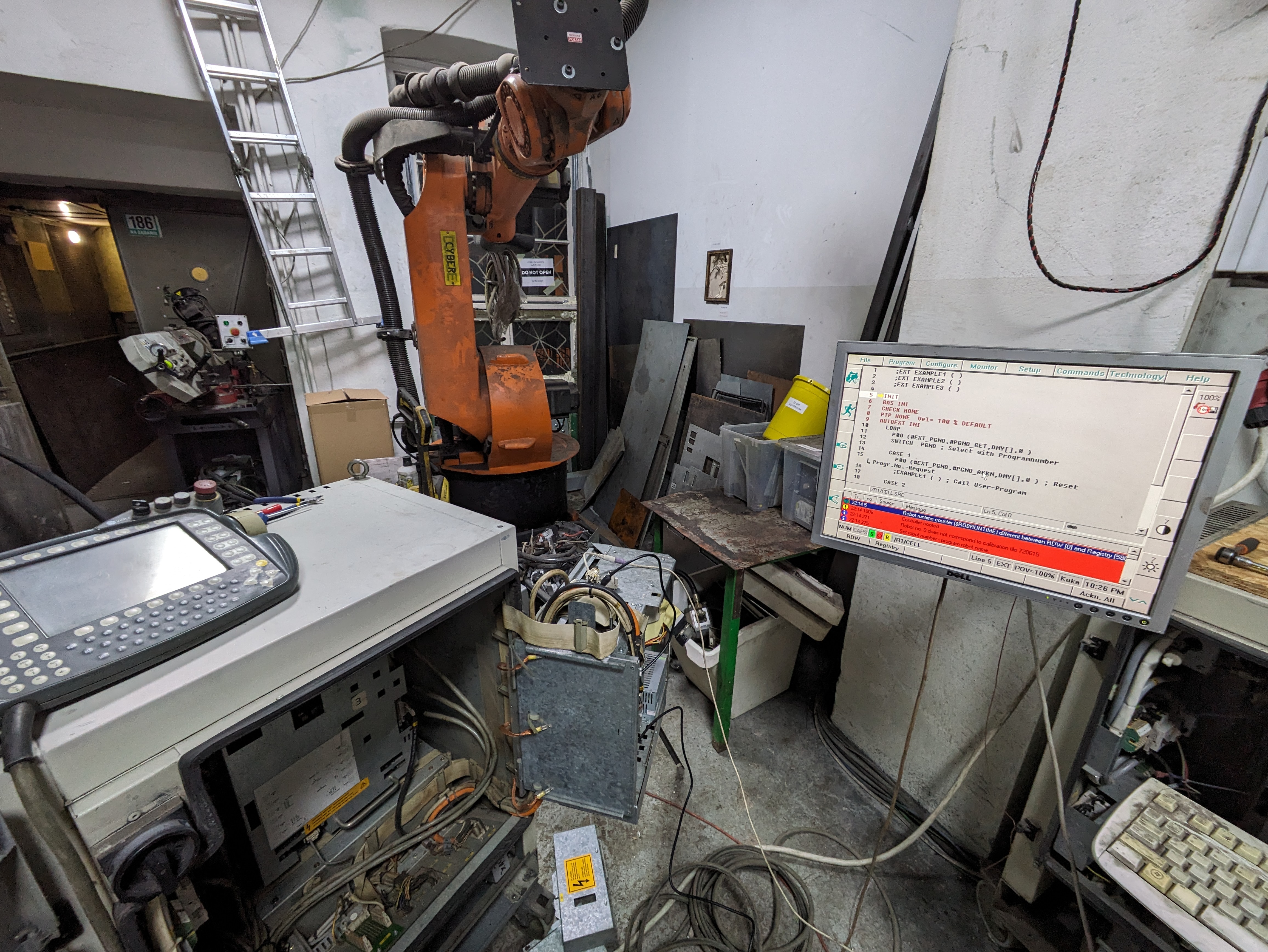
photo of a kuka kr200 robot, the krc1 controller that drives it and a monitor showing the controller software.
{kind=link}
https://fedi.quiescent.nexus/media/a575866c7911520a383ffd59ebd46aaf135a7762d4fb4bb35b46e96e24e9dcb9.jpg
076萌SNS is a social network, courtesy of 076. It runs on GNU social, version 2.0.2-beta0, available under the GNU Affero General Public License.
![]() All 076萌SNS content and data are available under the Creative Commons Attribution 3.0 license.
All 076萌SNS content and data are available under the Creative Commons Attribution 3.0 license.